PURPOSE:
Use experimental data to derive models of frictional force and use these models to predict the acceleration of a two-mass system.
INTRODUCTORY STATEMENT:
Our group performed five (5) different experiments involving
friction. This lab report is designed to give a detailed analysis of each experiment.
(1) STATIC FRICTION:
The first experiment involved measuring static friction on a flat surface.
Apparatus:
 |
| wooden board on a table top |
1) Use a C-clamp to secure flat surface to a table. We used a wooden board.
2) Secure pulley to the wooden board.
3) Attach hanging mass to wooden block using string.
4) Hang string off of pulley with the wooden block on the table and the hanging mass off the edge. Note: Make sure that the metal side of the block is on the table.
Procedure:
1) Add weight a little bit at a time until the wooden block begins to slip. Record the mass of the block and the corresponding hanging mass required to get the block to start to move.
2) Incrementally add mass to the wooden block. Record this new mass.
3) Reattach the hanging mass to the wooden block with string and hang it over the pulley.
4) Once again, add weight a little bit at a time until the block begins to slide.
5) Record the appropriate data and repeat these steps for a total of four data points.
6) Use your data to plot an N vs.
Fs, max graph.
The goal of this experiment was to derive the coefficient of static friction, μ
s between a block and a table. Given the model of static friction, we know that the coefficient of static friction between the block and the table equals the maximum value of static friction,
Fs, max divided by the normal force
N that squeezes them together:
μs = (Fs, max )/ N, or Fs, max = μsN
As previously stated, we incrementally added small weights to a hanging mass until the block just started to slip. According to Newton's first law, since the the block is not changing its motion, all of the forces acting on this object are balanced. Therefore, one can infer that there must be a static frictional force equal, but opposite to the weight of the hanging mass that is pulling on the other side of the block. In essence, we can conclude that:
Fs, max = weight of hanging mass = Mhangingg
(where g = 9.8 m/s/s, the acceleration due to gravity)
Furthermore, since the net force on the vertical axis must also be 0, we can infer that the normal force between the block and the table must be equal in magnitude, but opposite in direction to the weight of the block itself. In other words, we can also conclude that:
N = weight of block = Mblockg
Using this principle, we found the corresponding
Fs, max values and N values for blocks of different masses and plotted an N vs.
Fs, max graph on Lab Pro. This was our graph:
The red column lists the different block masses we tried. We started off with a block mass of 191.5 +/- 0.1 g, adding 100, 200, 300, and 500 g respectively. The black column lists the corresponding hanging masses which caused the block to slip. The original hanging mass --without additional weights-- had a mass of 50.0 +/- 0.1 g. The blue column lists the max. static friction force, Fs, max and the green column lists the normal force, N. The slope of this graph equals the coefficient of static friction, μs between the block and the table. Therefore, our value of μs ≈ 0.269
(2) KINETIC FRICTION:
The second experiment dealt with the measurement of kinetic friction on a flat surface.
Apparatus / Procedure:
It is essentially the same as the first experiment but with one major change: the hanging mass is replaced with a force sensor. Note: make sure the string is not too long because it needs to be pulled by someone at a constant speed.
1) Attach force sensor to wooden block with string. Note: make sure it is calibrated first. Also, we decided to keep the pulley as a guiding mechanism for the path of the block.
2) Use Lab Pro to collect force data as someone slowly pulls horizontally, moving the block at a constant speed. Store this run and record the mean value of the pulling force used to move the block at a constant speed.
3) Incrementally add mass to the wooden block and repeat the above steps. Store this run as well.
4) Repeat these steps for a total of four different masses for the wooden block.
5) Use your data to plot an N vs.
Fk graph.
The goal of this experiment was to derive the coefficient of kinetic friction, μ
k between the block and the table. Given the model of kinetic friction, we know that the coefficient of kinetic friction between the block and the table equals the kinetic friction force divided by the normal force
N that squeezes them together:
μk = (Fk)/ N, or Fk = μkN
In this experiment, we used a Force sensor to directly measure the average magnitude of force necessary to keep the block sliding at a constant speed. The block may be moving this time around, but this does not change our mentality towards the problem. In fact, Newton's first law dictates that since the block is not accelerating, all of the forces acting on this object are still balanced. Therefore, we can conclude that there must be a kinetic frictional force equal, but opposite to the force that is pulling on the other side of the block. In essence, we can conclude that:
Fk = Fsensor
(where Fsensor equals the mean force sensor reading for a given trial)
Furthermore, since the net force on the vertical axis must also be 0, we can infer that the normal force between the block and the table must be equal in magnitude, but opposite in direction to the weight of the block itself. In other words, we can also conclude that:
N = weight of block = Mblockg
Using this principle, we found the corresponding
Fk values and N values for blocks of different masses and plotted an N vs.
Fk graph on Lab Pro. This is the graph of our force sensor readings:
 |
| Force vs. Time graph (four runs) |
Below is our N vs. Fk graph:
 |
| Normal force vs. Kinetic friction force |
The black column lists the different block masses we tried. Just like the first experiment, we started off with a block mass of 191.5 +/- 0.1 g, adding 100, 200, 300, and 500 g respectively. The red column lists the kinetic friction force, Fk and the blue column lists the normal force, N for each corresponding mass. The slope of this graph equals the coefficient of kinetic friction, μk between the block and the table. Therefore, our value of μk ≈ 0.305
(3) STATIC FRICTION ON AN INCLINE:
The third experiment required us to measure static friction on a sloped surface.
Apparatus / Procedure:
1) Place a wooden block on a horizontal surface and slowly raised one end of the surface until the block just started to slip. Record the angle at which this happens as well.
2) Use a ring stand and C-clamp to secure the flat wooden surface in place. Ignore the motion detector attached at the top for now.
3) Use the angle at which the slipping begins to determine the coefficient of static friction between the block and the sloped surface.
Much like the first experiment, the goal was to derive the coefficient of static friction,
μs between a block and a table. Given the model of static friction, we know that the coefficient of static friction between the block and the table equals the maximum value of static friction,
Fs, max divided by the normal force
N that squeezes them together:
μs = (Fs, max)/ N, or Fs, max = μsN
In order to determine the coefficient of static friction between the block and the surface, we must use the aforementioned equation. However, we still have two variables missing:
Fs, max and N.
Therefore, we must draw a free body diagram (FBD) of all the forces acting on the block in order to determine
μs. In this FBD, our coordinate system is centered at the block with the axes parallel and perpendicular to the slope:
According to Newton's first law, since the the block is not changing its motion, all of the forces acting on the system are balanced. For this to be true, the net force for the x axis must be equal to 0. Thusly, the static friction force must be equal but opposite to the horizontal component of the weight of the block. Essentially, we concluded that:
Fs, max = mgsinθ (where m is the mass of the block)
Furthermore, since the net force on the vertical axis must also be 0, we can infer that the normal force between the block and the table must be equal in magnitude, but opposite in direction to the vertical component of the weight of the block itself. In other words, we can also conclude that:
N = mgcosθ
Using these equations, we were able to substitute them into our original equation for
μs to find that:
Fs, max = mgsinθ
μsmgcosθ = mgsinθ
μs = tanθ
Our value for μs = tan19° ≈ 0.344
(4) KINETIC FRICTION ON AN INCLINE:
The fourth experiment required us to measure kinetic friction on a sloped surface.
Apparatus / Procedure:
In this experiment, we essentially used the same apparatus as the previous experiment. There are two main differences: (a), we put our incline at a higher angle than before and (b), there is now a motion detector at the top of the incline.
1) Increase the angle of incline such that it will facilitate the acceleration of the block down the slope. Record this new angle.
2) Use a C-clamp and a metal rod to secure the motion detector onto the ring stand above the sloped surface. Make sure that the motion detector's line of sight is parallel to the incline's surface.
3) Tape a notecard to the back of the wooden block. This will make it easier for the motion detector to "see" the block.
4) Place the block near the motion detector with the notecard facing it. Hold the block a reasonable distance away from the motion detector to avoid inaccurate readings. We held it about 8 inches away.
5) Use the motion detector to create a velocity vs. time graph on Lab Pro. Use this graph to find the acceleration of the system.
With these changes in mind, we measured the angle of incline and used the slope of the velocity vs. time graph on Lab Pro to find the acceleration of the block. Here is our graph:
 |
| Linear fit of Velocity vs. Time graph |
We found our system acceleration to be a =
2.829 m/s/s
Much like the second experiment, the goal was to derive the coefficient of kinetic friction, μ
k between a block and a table. Given the model of kinetic friction, we know that the coefficient of kinetic friction between the block and the table equals the kinetic friction force divided by the normal force
N that squeezes them together:
μk = (Fk)/ N, or Fk = μkN
In order to determine the coefficient of kinetic friction,
μk, we drew a FBD of the system, created force equations for the x and y components, and solved for
μk. Here is our derivation of
μk:
Since the block's velocity changed, our strategy for finding
μk changed as well. Newton's second law dictates that since the block is accelerating down the slope, our net force can be written as the product of the system's mass and acceleration. More specifically, the net force in the x axis can be rewritten as the horizontal component of the block's weight minus the kinetic friction force equals mass times acceleration. Similarly, since the net force in the y axis is equal to 0, the vertical component of the block's weight must be equal in magnitude, but opposite in direction to the normal force. Using these equations, we were able to create a new expression for
μk:
μk = (gsinθ - a)/(gcosθ)
(where theta equals 30 degrees)
After plugging everything in, we found that μk ≈ 0.244
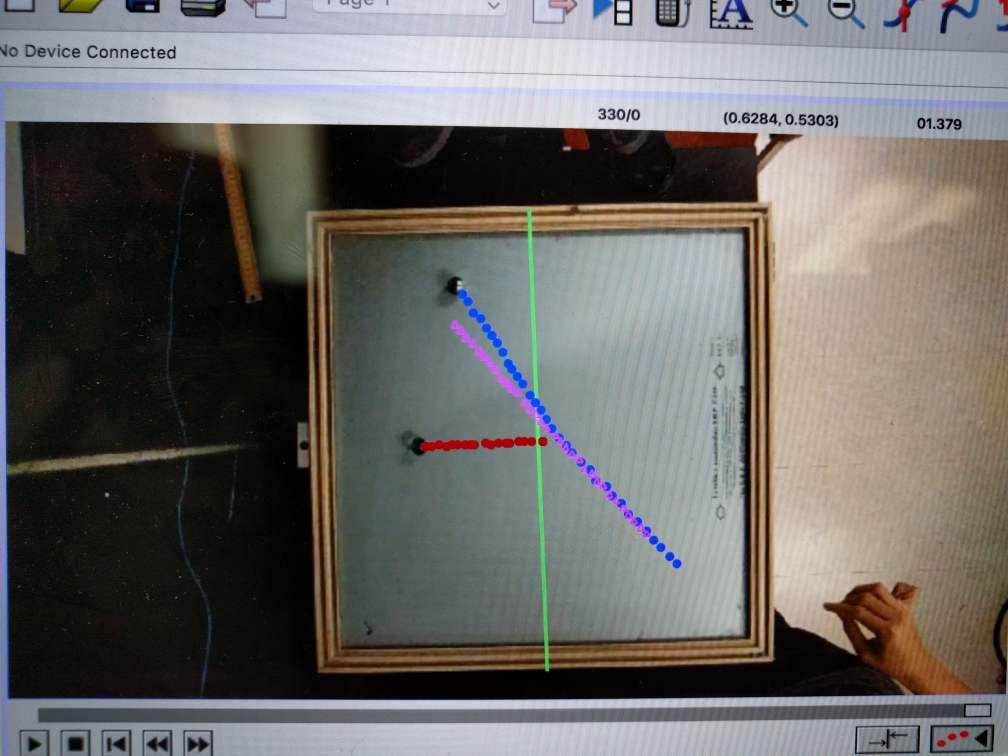
(5) PREDICTING THE ACCELERATION OF A TWO-MASS SYSTEM
Using the coefficient of kinetic friction from experiment 4, we had to derive an expression for what the acceleration of the wooden block would be if we attached a hanging mass that was sufficiently heavy to accelerate the system. This is the system we had to model:
To find the acceleration of the system, we drew FBDs of the system, converted the information into force equations for each axis, and manipulated these equations to create an expression for the acceleration. Here is our derivation of this expression:
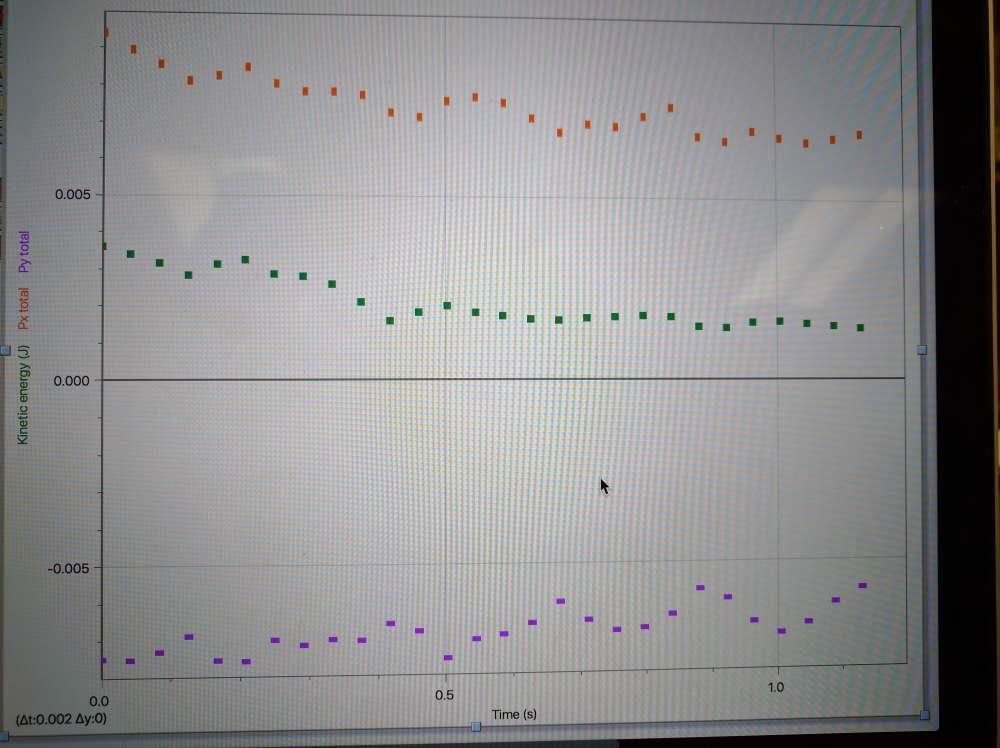
After plugging everything in, we found that the system acceleration, a = 2.964 m/s/s. To test the accuracy of our prediction, we ran the experiment ourselves. After one trial, we obtained a velocity vs. time graph and derived the acceleration from the slope of the linear fit of the graph. Here is the graph we obtained:
As you can see, we found the experimental acceleration, a
actual ≈
2.629 m/s/s.
CONCLUSION:
After finishing the lab, we asked our professor to look over our results to verify if it was reasonable. He not only agreed it was reasonable but also concluded that our theoretical value for the system acceleration was much closer than he had anticipated his students to have. However, no matter how close our models may come to real life situations, there will most likely be uncertainties which can contribute to error in our calculations. One possible source of error in our calculations was human error. In experiment 4, for instance, placing the wooden block too far or too close to the motion detector could have resulted in inaccurate readings for the velocity of the system. Another source of error could have been the preciseness of our measurements and other quantities. For example, we decided to round the coefficient of kinetic friction from experiment 4 to three significant figures in our calculations of the system acceleration in experiment 5. Similarly, we decided to use 9.8 m/s/s for the acceleration due to gravity instead of 9.81 m/s/s. While such practices may be considered trivial by some individuals, an astute 4A student would be able to recognize the propagated uncertainty inherent to these small changes and would be encouraged to mitigate this uncertainty to the highest degree. Despite these erroneous conventions, I still maintain that our lab was an overall success.
GROUP MEMBERS: Matthew I., Xavier L., Billy J.